



 English
English 中文
中文 Italian
Italian Türkçe
Türkçe Português
Português Español
Español Deutsch
Deutsch العربية
العربية Tiếng Việt
Tiếng Việt Français
Français Русский
Русский





Ms.Lizzy
Dinosaw의 Lizzy입니다(로봇 아님). 어떤 머신(모델)이 필요하십니까? 지금 WhatsApp으로 문의하십시오
 Sep 19, 20255분 소요
Sep 19, 20255분 소요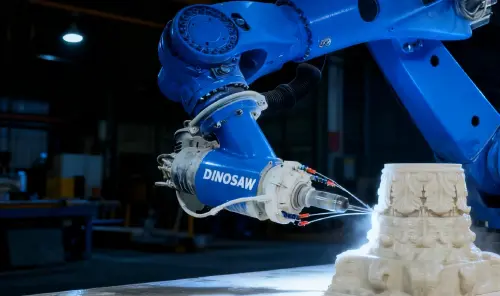 Sep 19, 20255분 소요
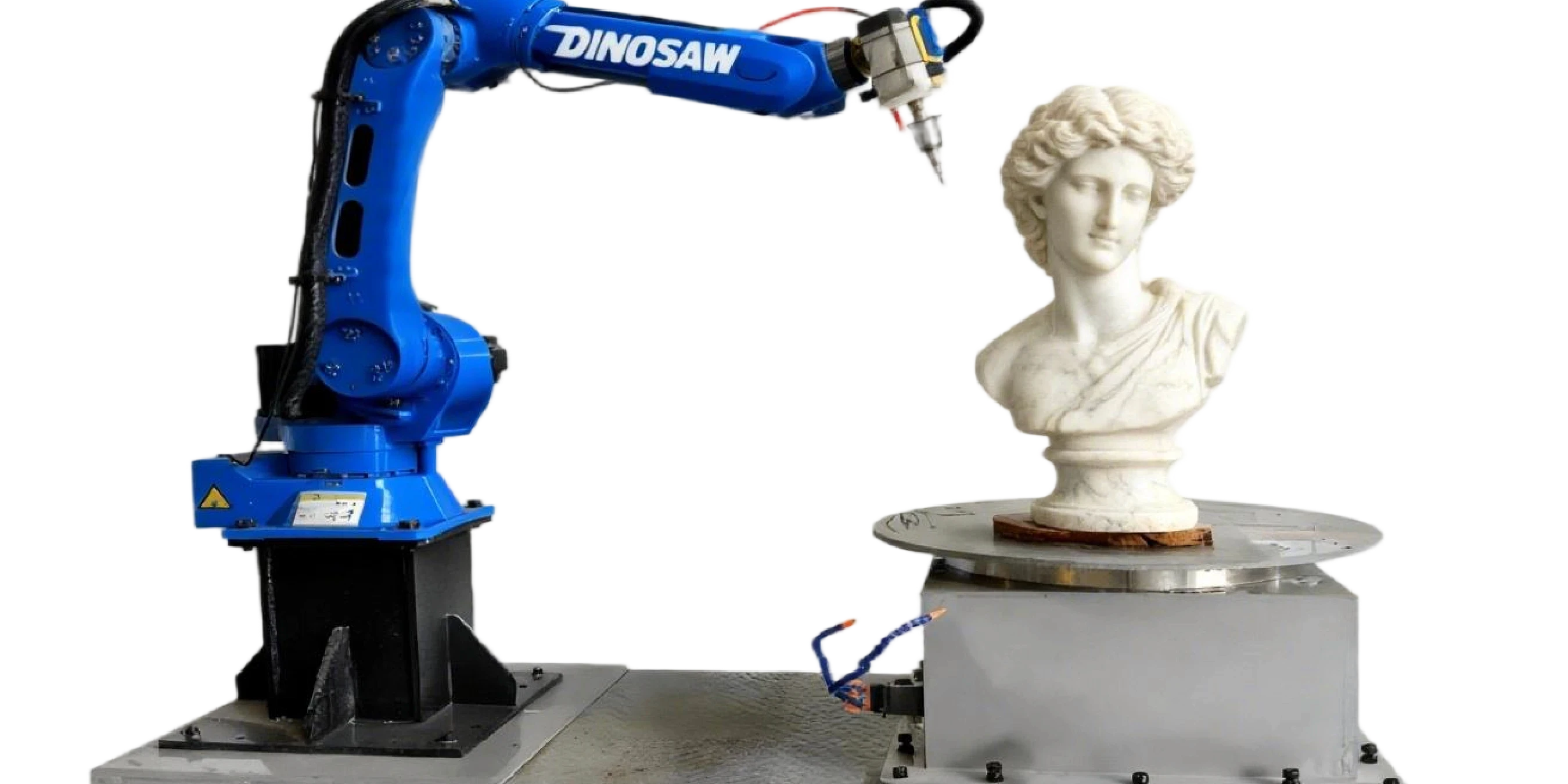
Sep 19, 20255분 소요Dinosaw Machine 7축 로봇 석재 조각 셀의 기술적 구조 분석 귀사 현장 적용을 위한 아키텍처, 핵심 구성요소, 운전 파라미터, 결함 대응방안 가이드 화강암, 대리석, 석회석 적용 ±0.06 mm 반복정밀도 확보
화강암, 대리석, 석회석 조각 작업은 정밀도, 강성, 분진/슬러리 관리 등 기계적 한계를 지향합니다. 7축 로봇 석재 조각 셀(6축 로봇 + 로터리 테이블 + 수냉 스핀들)은 반복정밀도(±0.06 mm, 제조사 기준), 운전 안전성, 사이클 타임 예측을 제공합니다.
Dinosaw 석재 조각 로봇 아키텍처 및 다이아몬드 공구 적용 사례를 참고하십시오.
현장 가공 조건에 맞는 기술 스펙 연동이 필요하십니까? 엔지니어가 상세 연동 방안을 제공할 수 있습니다.
셀 성능은 네 가지 핵심 기둥(기계, 제어, 소프트웨어, 안전)의 유기적 연계로 구현됩니다. 일반 워크플로우는 3D 스캔 혹은 CAD 모델을 CAM 소프트웨어로 입력 후 다축 툴패스 생성, 제어기에 전송하여 조각에 필요한 동기화된 복합 동작을 실행하는 방식입니다.
로봇 셀 각 부품별 운전 범위를 명확히 이해해야 최적 가공 및 장애 대응이 가능합니다. 수냉 스핀들, Dinosaw 다이아몬드 공구 등 핵심 시스템의 주요 파라미터 확인이 필수입니다.
| 구성품 | 주요 파라미터 및 표준 범위 |
|---|---|
| 수냉 스핀들 | 속도 6,000–24,000 RPM 토크 각 RPM별 Nm 냉각 유량 5–15 L/min(1.3–4.0 gpm) |
| Dinosaw 다이아몬드 공구 | 샹크 직경 6 mm, 8 mm, 12 mm 툴군 볼노즈/플랫엔드 밀, 테이퍼 조각 비트, V-그루브 비트, 버 |
| 로터리 테이블(7축) | 직경 최대 원석 크기 연동(고정구 설계 확인) mm/in 최대 적재 용량 가장 무거운 원석 기준(기계 설계 시 확인) kg |
| 비전/스캔 시스템 | 해상도 스캐너 모델별 해상도 상이(공급사 확인) mm 포인트 간격 |
선제적 유지보수 및 결함 유형 숙지가 고마모 석재 조각 환경에서 최대 가동시간 확보 핵심입니다.

로봇 셀은 독립 운전이 아닙니다. 타 시스템과의 통신 및 표준 데이터 포맷 수용능력이 활용도 결정 요소입니다.
아래 표는 석재별 조각 시작점 파라미터를 제시합니다. 실제 귀사 현장 장비, 공구, 재료 로트별 최적값으로 조정하십시오.
| 가공 단계 | 공구 | 스핀들 속도(RPM) | 이송 속도(mm/min) | 스텝오버 |
|---|---|---|---|---|
| 러핑 | Dinosaw 볼노즈 밀 | 8,000–12,000 | 1,000–2,000 | 공구 직경의 40–50% |
| 피니싱/각인 | Dinosaw V-그루브 비트 | 15,000–20,000 | 500–1,000 | N/A |
| 가공 단계 | 공구 | 스핀들 속도(RPM) | 이송 속도(mm/min) | 스텝오버 |
|---|---|---|---|---|
| 러핑 | Dinosaw 볼노즈 밀 | 10,000–15,000 | 1,500–3,000 | 공구 직경의 50–60% |
| 피니싱 | Dinosaw 테이퍼 비트 | 18,000–24,000 | 800–1,500 | 공구 직경의 5–10% |
| 가공 단계 | 공구 | 스핀들 속도(RPM) | 이송 속도(mm/min) | 스텝오버 |
|---|---|---|---|---|
| 러핑 | Dinosaw 볼노즈 밀 | 12,000–18,000 | 2,500–4,000 | 공구 직경의 50–70% |
| 피니싱 | Dinosaw 테이퍼 비트 | 20,000–24,000 | 1,200–2,000 | 공구 직경의 10–15% |
Dinosaw 7축 조각 셀은 석재 가공을 위한 정밀도 및 내구성 중심 엔지니어드 생태계입니다. 수냉 스핀들, Dinosaw 다이아몬드 공구, 강력 제어시스템 아키텍처가 진동 치터·열 드리프트 등 대표 결함 대응에 직결됩니다. 엔지니어·유지보수팀에게는 높은 가동률, 품질 일관성, 안전한 작업 환경으로 귀결됩니다. 다음 단계는 귀사 현장 조건에 기술적 역량을 연동하는 것입니다.
가장 무거운 원석 기준 적재 용량(기계 설계 시 확인) kg, 최대 부품 크기 기반 도달거리(레이아웃 설계 시 확인) mm/in이 대표 출발점입니다. 스핀들, 툴 체인저, 툴 무게 포함 설계 필요 로터리 테이블 직경은 최대 원석 크기 기준(고정구 설계 시 확인) mm/in
최대 원석 크기 기준 테이블 직경(고정구 설계 시 확인) mm/in, 가장 무거운 원석 기준 용량(기계 설계 시 확인) kg 인덱싱 정밀도는 통상 아크초 단위(공급사 확인) 테이블 주위 로봇 동작 공간 확보 필요
스핀들 온도는 제조사 지침에 따라 냉각 및 온도 제어 구동 워밍업 사이클 운전 및 열 안정화 후 중요 피니싱 배치 권장
시스템은 Profinet, OPC UA 등 산업 표준 프로토콜 연동 지원 설계 단계에서 필요 프로토콜 확인 I/O 매핑(고정구, 센서 등) 및 중앙 안전회로 연동 용이
필수 안전설비는 이머전시-스톱 회로, 인터락 도어, 인클로저 보호(IP65 등), 스핀들 상태 모니터 포함 지역 기준에 따라 설비 및 테스트 주기 확인하십시오
대표 방식은 스핀들 로드 트렌드 모니터링, 소프트웨어 기반 툴 수명 카운터 자동 변경 트리거, 레이저 툴세터 연동 사이클 중 공구 치수 자동 측정 등입니다
필수입니다. OLP 소프트웨어(SprutCAM 등)은 가동시간 극대화 프로그램 운전중 동시 프로그래밍, 복잡 7축 동작 시뮬레이션 및 충돌 회피, 3D 스캔 데이터 툴패스 변환에 핵심적 역할을 합니다
 한국어
한국어안녕하세요 👋 어떤 도움이 필요하십니까